
selon les méthodes de l’IGN et du MAP
Prises de vue
Les prises de vue peuvent être réparties en 3 étapes spécifiques, correspondant à une étape de calcul postérieure : calibration – orientation – corrélation.
- La calibration détermine les paramètres internes de l’appareil photographique en fonction de ses réglages : la focale, le diaphragme, la taille de l’image (ces trois premiers paramètres sont extraits des données EXIF et peuvent être recalculés plus finement), la distorsion, ainsi que la position de différents points optiques (tel que le point principal d’auto-collimation). Une calibration est donc valable pour une seule configuration de l’appareil.
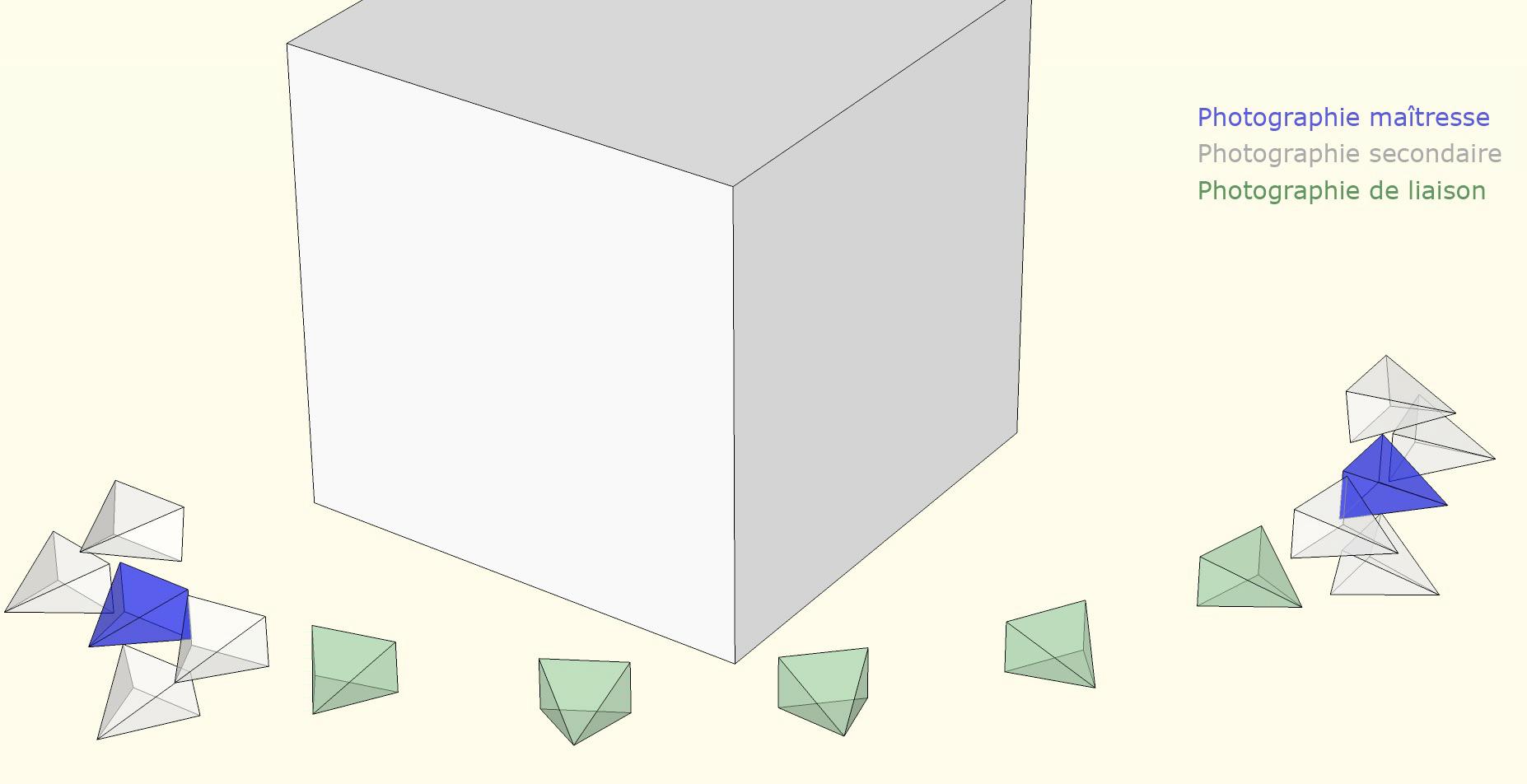
- Les photographies de corrélation permettent l’obtention d’une « face » de l’œuvre. En prenant une photographie maîtresse et des photographies secondaires depuis des points de vues proches, on peut calculer un nuage de points. Chaque pixel de la photographie maîtresse peut donner un point en trois dimensions (on crée une carte de profondeur à partir de la photographie maîtresse).
- Les photographies d’orientation constituent le lien entre chaque nuage qui composera l’œuvre complète. Elles permettent de repérer suffisamment de points homologues dans l’ensemble des vues pour situer les prises de vues et l’œuvre les unes par rapport aux autres.
Traitement numérique
La méthode de traitement d’images utilisée pour le projet est celle développée par laboratoire MATIS (Méthodes d’Analyses pour le Traitement d’Images et la Stéréorestitution) à l’IGN (Institut National de l’information Géographique et Forestière).
Le programme MICMAC (Multi-Images Correspondances, Méthodes Automatiques de Corrélation) permet de traiter les lots de photographies dont on vient de parler pour :
- Définir les points homologues entre différentes photographies (avec le programme Tapioca)
- Orienter grâce à ces points homologues les positions des différentes prises de vue (avec le programme Tapas)
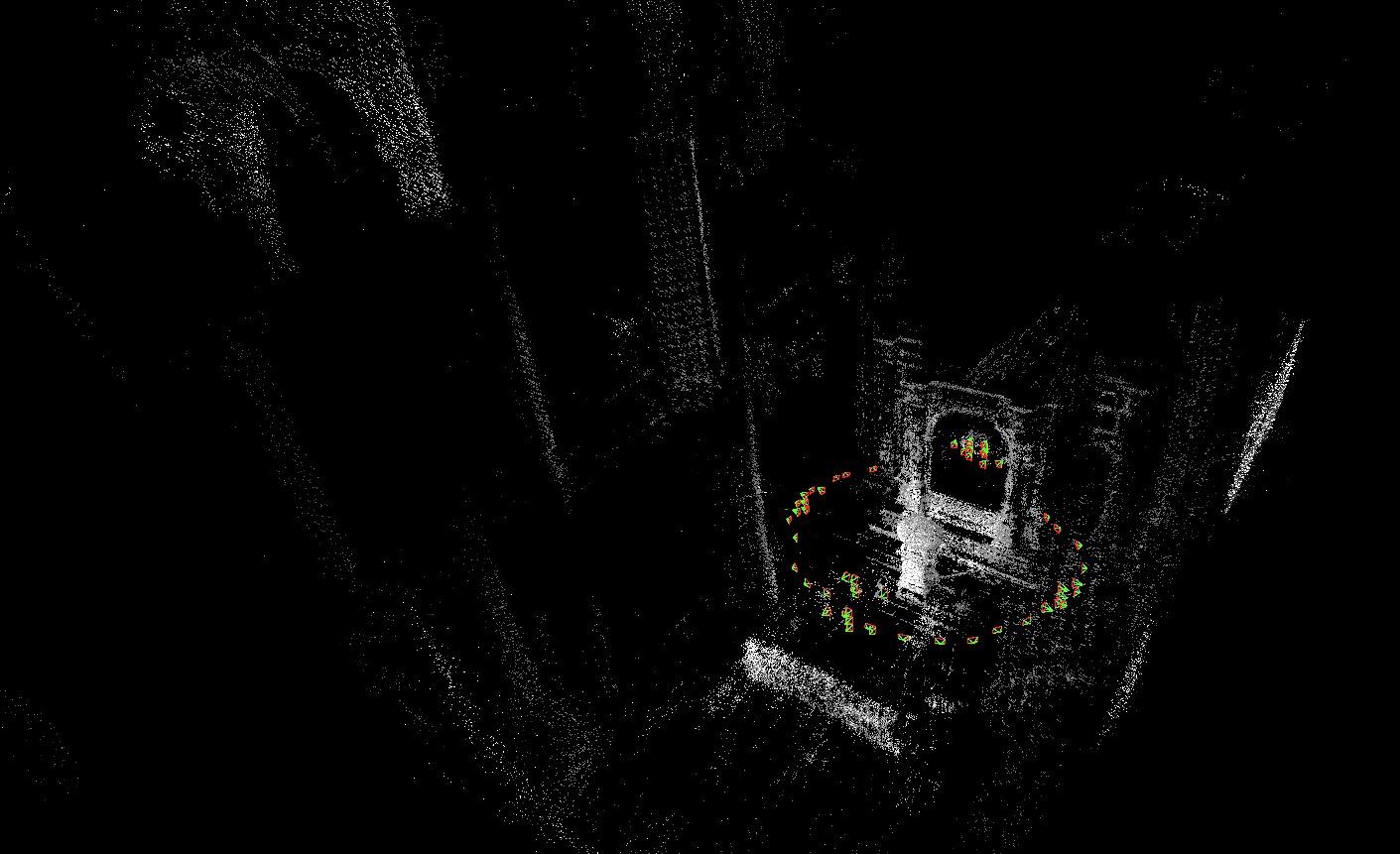
- Afficher la position des caméras et les points d’orientation dans un fichier informatif .ply (points Stanford) (avec le programme Apericloud)
- Mettre l’objet à l’échelle (avec le programme SaisieBasc, uniquement opérationnelle sous Linux et Mac OS)
- Créer un masque pour détourer l’objet à modéliser sur chaque photographie maitresse pour la corrélation dense (avec le programme SaisieMasc ou manuellement sous Photoshop)
- Développer une corrélation dense et une carte de profondeur selon ce masque (avec le programme Malt)
- Traduire en nuage de point .ply et texturer cette carte de profondeur (avec le programme Nuage2ply). L’image de texture doit être nommée explicitement et peut-être modifiée à volonté. Il est à noter que ce programme définit une couleur par point, et le nuage n’a pas de paramétrisation UV (plaquage de texture par coordonnées 2D).

On obtient donc ainsi des nuages de points (un par croix de corrélation), qu’il reste à fusionner et à nettoyer, car certains points sont aberrants. Enfin, pour un affichage dans la plupart des logiciels de rendu (comme Autodesk 3DS Max), il faut trianguler les nuages de points, c’est à dire les transformer en ensemble polygonal. L’INRIA développe le logiciel CGAL qui travaille à optimiser les algorithmes nécessaires à ce type de travaux.
